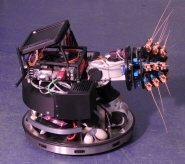
One can see, one can smell to "see" the world. Once can also touch but with whiskers? The Etruscan shrew, one of the world’s tiniest mammals, measuring around 4 centimeters long, is the inspiration for a ground-breaking new robot developed to use sophisticated whiskers to find its way around. The Shrewbot is the latest in a series of robots which use active touch rather than vision to navigate their environment.
One can see, one can smell to "see" the world. Once can also touch but with whiskers? The Etruscan shrew, one of the world’s tiniest mammals, measuring around 4 centimeters long, is the inspiration for a ground-breaking new robot developed to use sophisticated whiskers to find its way around. The Shrewbot is the latest in a series of robots which use active touch rather than vision to navigate their environment.
!ADVERTISEMENT!
The Shrewbot has been developed at Bristol Robotics Laboratory (BRL) in collaboration with the University of Sheffield Active Touch Laboratory as part of the BIOTACT project, Professor Tony Pipe (UWE Bristol) and Professor Tony Prescott (University of Sheffield) are working on the Shrewbot project with a number of partners. BRL is a collaboration between UWE Bristol and the University of Bristol.
The Etruscan shrew is nocturnal, relying on its whiskers to find, track and capture its prey – often the same size as itself. The efficiency of this tiny creature has inspired scientists to look at ways of replicating the shrew’s whiskers to enable robots to find their way around without the use of vision.
The Etruscan shrew has a slender (not truncated) body with a length between 3 and 4.5 cm excluding the tail. The tail is longer than half of the body. The body mass varies between 1.3 and 2.4 grams. The head is relatively large, with a long mobile proboscis, and the hind limbs are relatively small. Near the mouth growth a dense array of short whiskers, which the shrew actively uses in searching for prey, especially in the night.
Vision is the sense that has so far been most extensively studied and understood in terms of how it could be used for autonomous robots. However there are numerous examples in nature, particularly in nocturnal creatures, where active touch plays a primary role in how the animal finds its way around and how it behaves.
The shrew sweeps its whiskers back and forth at high speeds and through picking up vibrations it gathers information from the environment such as the location, shape and texture of objects. It then stores this information in its memory.
Professor Tony Prescott (University of Sheffield) says, "When the whiskers touch an object this causes them to vibrate and the vibration pattern is picked up by sensitive cells in the hair follicle at the base of the whisker. These patterns are turned into an electrical signal which is sent to the brain, enabling the mammal to make instant decisions about its environment to help it move around or catch prey. The whiskers have another advantage over some other forms of tactile touch. Whiskers themselves are easily replaceable since the sensory cells are at the base of the whisker, not the top, unlike our fingers for example, which are more easily damaged and hard to replace."
The research has developed man-made whiskers that can move separately and are mounted on a mobile robot. They mimic the capability of the shrew by capturing information in the robot’s environment and allow it to make decisions about how to move in a particular environment.
Professor Tony Pipe (UWE, Bristol) explains, "There are real advantages to this form of tactile sensing for robots that we are just beginning to understand. For example this whisker technology could have applications in dark, dangerous or smoke filled environments which are unsafe for humans, where in future we might want robots to go. Overall this project has taken us to a new level in our understanding of active touch sensing and in the use of whisker-like sensors in intelligent machines."
For further information and photo: http://www.bristol.ac.uk/news/2012/8177.html