DGIST research team succeeded in developing a microrobot that can reach the accurate location of cardiovascular disease such as the Chronic Total Occlusion) by moving and steering the microrobot towards a desired direction inside complicated blood vessels.
DGIST research team succeeded in developing a microrobot that can reach the accurate location of cardiovascular disease such as the Chronic Total Occlusion) by moving and steering the microrobot towards a desired direction inside complicated blood vessels. This research is expected to increase the success rate of treatment and shorten the time of cardiovascular disease surgery.
DGIST announced on February 27 that Professor Hongsoo Choi’s team in the Robotics Engineering Department developed the ‘Magnetically Controlled Microrobot’ that can enhance the success rate of CTO treatment among myocardial infarctions through a joint research with Professor Byung-Ju Yi’s team at Hanyang University and Professor Bradley J Nelson’s team at idgenössische Technische Hochschule Zürich in Switzerland.
Since the guidewire used for percutaneous coronary intervention), which opens up the obstructed blood vessels, is controlled manually by a surgeon to change its direction and location, the success rate and speed of surgery had depended on the surgeon’s skill. It had been difficult to control the exact location and direction as the surgeon had to manually set and push the guidewire with bent ends inside complex blood vessels or junction.
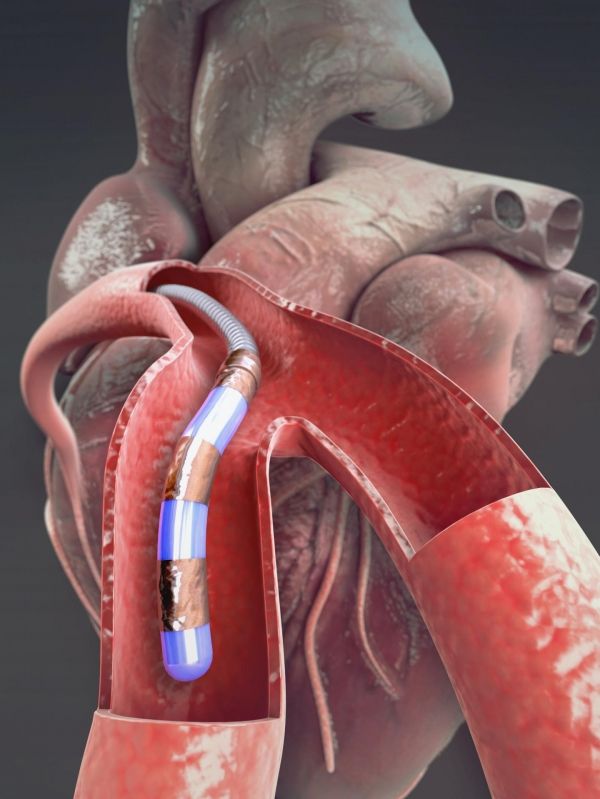
To overcome this limitation, Professor Choi’s team applied flexible and biocompatible polymer as well as neodymium magnet that can control the direction and location with as external magnetic field. Using this, the team developed a cylindrical microrobot with a diameter of 500㎛ and length of 4mm and attached it at the end of guidewire. The team developed an attachable guidewire soft microrobot that can steer the guidewire towards a desired direction by controlling the microrobot with the external magnetic field and enable a rectilinear motion through Master-Slave System).
Read more at DGIST (Daegu Gyeongbuk Institute of Science and Technology)
Image: Concept map of attachable guidewire microrobot developed by Professor Hongsoo Choi 's team in the Department of Robotics Engineering at DGIST (Credit: ©DGIST)